Stepper motors have different torque-speed characteristics depending on whether the motor is starting/stopping or already running. These characteristics are depicted in two curves on the motor’s torque-speed chart, and it’s important to understand the differences between these curves and what each one means for the motor’s operation. But a stepper motor can also produce torque when it is not moving, and these stationary torque values — referred to as holding torque and detent torque — are also important factors to consider when sizing and selecting a stepper motor.
The torque-speed curves for a stepper motor are developed with a specific motor-drive combination, operating voltage, and driving method. Any deviations from the stated motor-drive combination and operating conditions can change the system’s torque-speed characteristics.
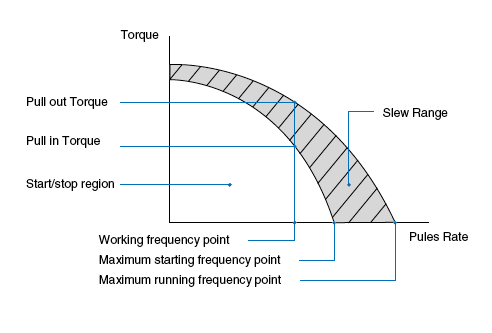
A stepper motor cannot start (or stop) instantly in the “slew range” between the pull-in and pull-out curves. Instead, it must accelerate into (or decelerate out of) that operating range to avoid losing steps.
Image credit: Moons’ Industries
Pull-in torque curve
The pull-in torque curve shows the range of conditions (maximum torques at given speeds) under which the motor can start and stop in synchronism with the input pulses — in other words, without losing steps. At any point on or below this curve — referred to as the “start/stop” or “self-start” region — the motor can start or stop instantly (that is, without accelerating or decelerating) without losing steps.
Pull-out torque curve
Also referred to as “running torque” or “dynamic torque,” pull-out torque is the maximum load (torque) a stepper motor can produce while it’s rotating, without losing steps. If operated at a point beyond the pull-out torque curve, the motor can stall.
The area between the pull-in and pull-out curves is often referred to as the “slew range.” In this range, the motor cannot be immediately stopped or started — it must be started in the start/stop region and accelerated to the slew range, or it must be decelerated from the slew range to the start/stop region and then stopped.
Holding torque
One of the beneficial features of a stepper motor is its ability to hold a load in place when the motor coils are energized, due to the attraction between the rotor and stator. This is referred to as the motor’s holding torque and is the torque required to move the motor one full step when the coils are energized but the rotor is stationary. A stepper motor’s holding torque is higher than its running torque and is limited primarily by the amount of current the motor can withstand.
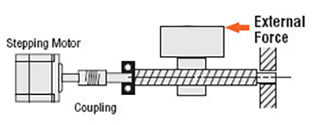
Stepper motors are able to hold a load in place, even against an external force, when the motor is stationary.
Image credit: Oriental Motor U.S.A. Corp
Detent torque
Detent torque occurs when the motor is not energized — that is, no current is flowing through the motor windings. It occurs because of the attractive forces between the magnets in the motor’s rotor and the stator. Both permanent magnet and hybrid stepper motors experience detent torque, but variable reluctance designs do not. (Recall that variable reluctance steppers use a non-magnetized rotor, so there is no attraction between the rotor and the stator when the motor is not energized.)
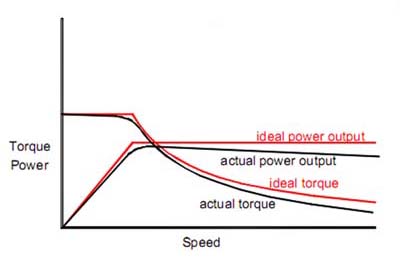
Detent torque reduces both the ideal power and ideal torque that the motor could produce, with the effect becoming larger as speed increases.
Image credit: Geckodrive Motor Controls
Detent torque is often given in the motor’s data sheet and is an important factor in stepper motor sizing and selection because it must be overcome before the motor will move. The amount of power required to overcome detent torque is proportional to the motor’s speed — the faster the motor is rotating, the more significant the effect detent torque will have on the motor’s actual torque output. But detent torque can be beneficial when the motor is stopping because it counters the momentum of the moving rotor, so higher detent torque will help the motor stop more quickly.
The post Stepper motor torque and speed characteristics explained appeared first on Linear Motion Tips.