Unless you’re playing the violin, stiction, or stick-slip, is an unwanted condition caused by the difference between static and dynamic friction between the two surfaces. When stiction occurs in linear guides, it can lead to chattering (“jerky” motion), seized motion, fluctuating torque requirements, or a loss of accuracy in the form of overshooting.
What causes stiction?
The coefficient of static friction (μs) between two surfaces is almost always higher than the coefficient of dynamic (kinetic) friction (μk), and this variation in friction is the underlying cause for stick-slip.
All surfaces have some amount of roughness. Even highly finished and polished surfaces are not perfectly smooth — they have peaks (referred to as “asperities”) and valleys that reduce the effective contact area of the surfaces. In other words, in some places, only the peaks of the two surfaces are in contact, while in other places, the peaks of one surface settle into the valleys of the other surface. And in some places, there is no contact between the surfaces.
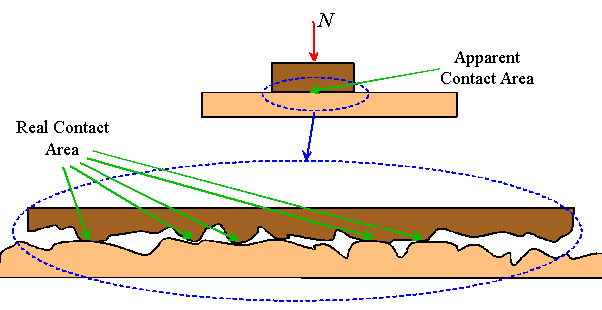
Linear bearing surfaces are microscopically rough, with asperities and valleys, so the real contact area between them is much smaller than the apparent contact area.
Because the individual contact areas are very small, the pressure between the surfaces is extremely high (pressure = force ÷ area), and adhesion occurs at these points through a process known as cold welding.
Before the surfaces can move, the bonds that cause this adhesion must be broken. Similarly, where the surfaces interlock (the peaks of one surface settle into the valleys of the other surface), abrasion, or plastic deformation, must occur to break these interlocked areas and allow the surfaces to move.
Once the motive force is high enough to break these bonds between the surfaces — and overcome the static friction — motion begins. But even during motion, some abrasion still occurs because the surfaces are still not perfectly smooth. The resistance to motion due to the remaining surface roughness is referred to as dynamic, or kinetic, friction.
How to reduce stiction
For linear bearings that use lubrication (virtually all recirculating bearings and some plain bearings), the movement between the bearing surfaces draws lubrication into the microscopic spaces between the surfaces. As the relative velocity of the surfaces increases, the lubrication film becomes thicker and surface-to-surface contact is reduced, so friction between the surfaces decreases.
But linear bearings travel a finite distance and then return in the opposite direction (as opposed to radial bearings, which can rotate in the same direction indefinitely), so they spend a good amount of time in what is known as mixed lubrication, where friction is determined by both the properties of the surfaces and the properties of the lubricant. Therefore, proper lubrication is the best way to control or reduce the effects of stiction in recirculating bearings (and in some plain bearings).
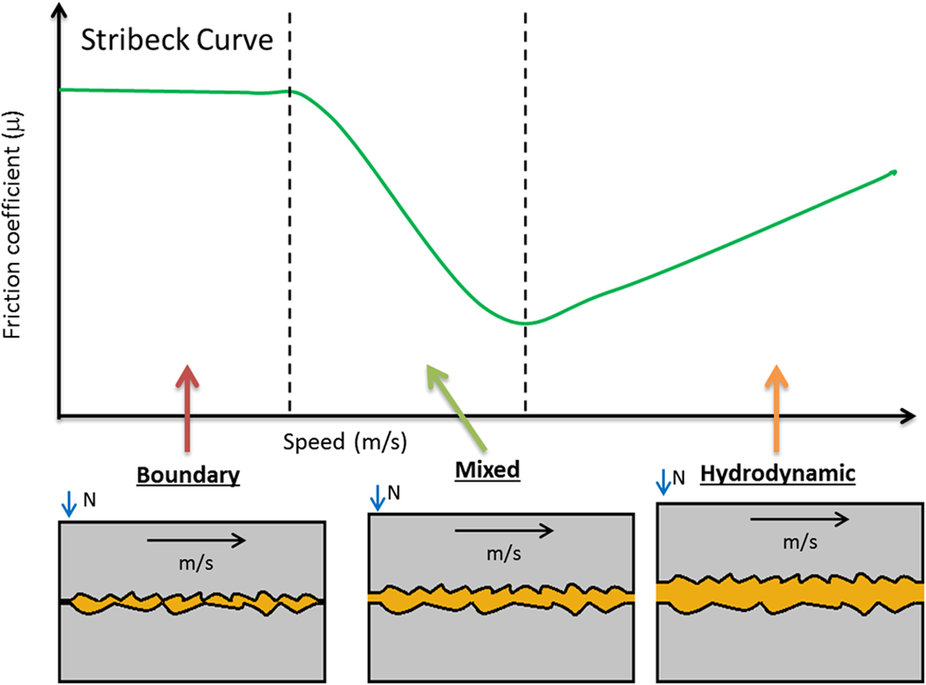
Bearings operate under one of three lubrication conditions. In mixed lubrication, friction is influenced by both surface properties and the properties of the lubricant.
Image credit: nature.com
Stick-slip, or stiction, is often more problematic in plain bearings than in recirculating bearings. This is because plain bearings experience a greater difference between static and dynamic friction coefficients. And the friction coefficient of a plain bearing can vary, depending on the applied load, wear, and environmental factors.
For plain bearings that ride on round shafts, one way to counter the effects of stick-slip is to choose shafts with the highest surface finish (lowest surface roughness) that is practical. And following the 2:1 ratio (also referred to as the 2:1 rule or the binding ratio) — which specifies that the moment arm distance should not be more than twice the bearing length — is very often necessary to prevent stick-slip in plain bearing applications.
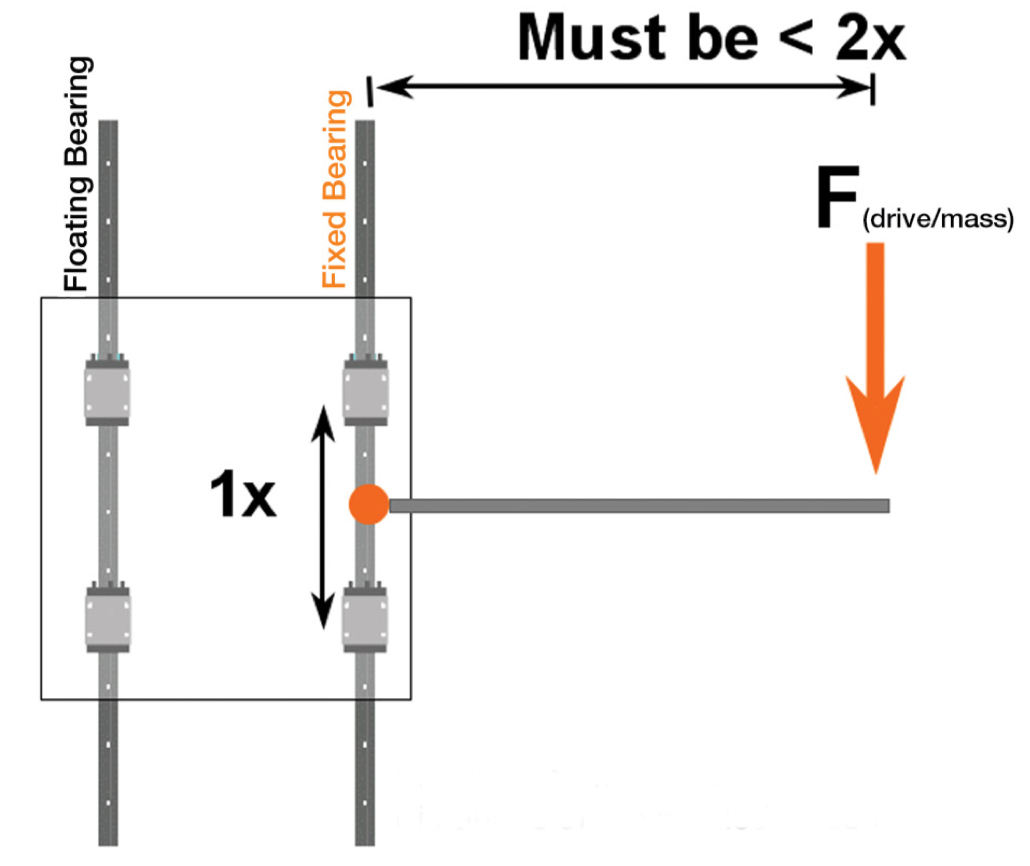
For plain bearings, the 2:1 ratio specifies that the moment arm created by the driving force or applied load should be less than two times the center-to-center distance between bearings.
Image credit: igus
Another option to minimize, or even prevent, stick-slip is to use air bearing guides. For air bearings, friction is solely a function of air shear from motion. Therefore, the difference between static and kinetic friction in an air bearing assembly is essentially zero, so the problem of stick-slip is virtually eliminated.
The post How to reduce the effects of stiction (stick-slip) in linear guides appeared first on Linear Motion Tips.